Crickit & Servos
What is the CRICKIT?
- The CRICKIT board can be used in conjunction with a supported Circuit Playground board (such as the CPX or Bluefruit) to control more powerful motors that the Circuit Playground board could not power by itself.
- It also has the capability of hooking up additional sensors to the CRICKIT

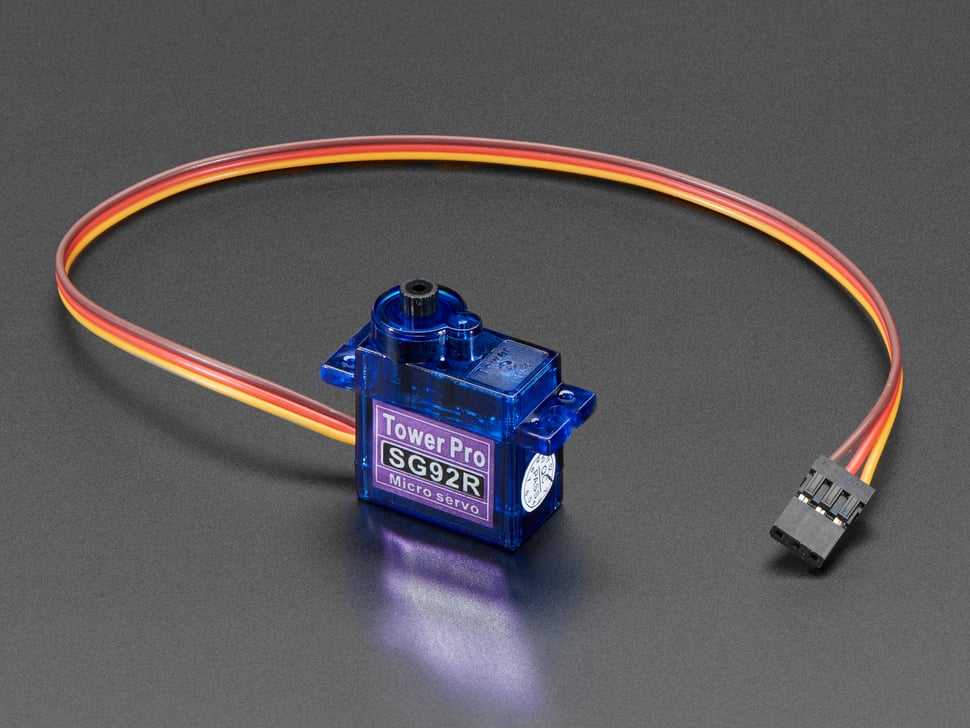
Servo Motors
Servos are specialized motors that can be programmed to move in precise increments. The servo we will be using has a special control signal that instructs the motor to move its arm to a specific angle (between 0 and 180 degrees).
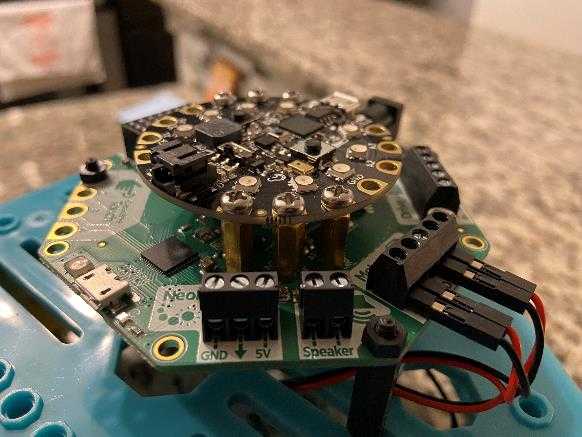
Assembly
-
Attach the Circuit Playground board to the CRICKIT
-
Use the metal spacers and screws (inside of CRICKIT bag)
-
The micro USB on the CP board should align with the power supply of the CRICKIT
Programming
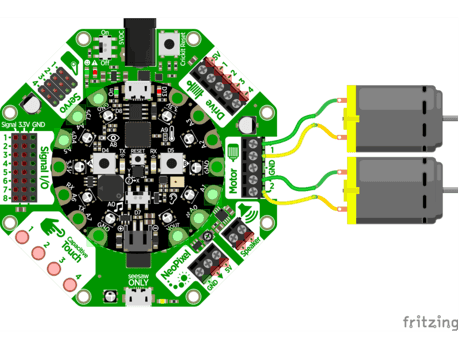
After plugging the servo cable into Servo 1 on the CRICKIT (yellow wire toward the outside), the following program can be run to demonstrate the full range of motion of the servo motor arm:
from adafruit_crickit import crickit
import time
def move_and_sleep(angle):
crickit.servo_1.angle = angle
time.sleep(5)
while True:
move_and_sleep(0)
move_and_sleep(180)Now let’s use the phone to move the servo arm gradually through its range of motion. We’ll use Bluetooth packets of type ButtonPacket to receive Left and Right button presses from the app’s Control Pad. We’ll use a global variable that keeps track of the current angle of the servo arm, and we’ll implement a function adjust_angle that rotates the arm by the specified amount:
from adafruit_crickit import crickit
from adafruit_bluefruit_connect.packet import Packet
from adafruit_bluefruit_connect.button_packet import ButtonPacket
from adafruit_ble import BLERadio
from adafruit_ble.advertising.standard import ProvideServicesAdvertisement
from adafruit_ble.services.nordic import UARTService
ble = BLERadio()
uart_service = UARTService()
advertisement = ProvideServicesAdvertisement(uart_service)
# Start with arm at the halfway point
angle = 90
crickit.servo_1.angle = angle
def adjust_angle(amount):
global angle
angle = angle + amount
crickit.servo_1.angle = angle
while True:
# Keep advertising until another device connects
ble.start_advertising(advertisement)
while not ble.connected:
pass
ble.stop_advertising()
# Keep listening for packets while connected
while ble.connected:
if uart_service.in_waiting:
packet = Packet.from_stream(uart_service)
if isinstance(packet, ButtonPacket):
if packet.pressed:
if packet.button == ButtonPacket.LEFT:
adjust_angle(20)
elif packet.button == ButtonPacket.RIGHT:
adjust_angle(-20)Challenge Problem
If you experiment with the above program enough, it will eventually crash with a ValueError exception (Hint: try rotating it beyond its full range of motion). Add two if blocks to the adjust_angle function that will prevent angle from going outside its valid range.